Research Overview
Please see the publications page for further information about our research.
Vehicles
The amount of electrical power on board vehicles has increased exponentially in recent decades and is expected to continue following this trend long into the future. Aircraft, naval ships, and both on- and off-road vehicles will all see dramatic improvements in efficiency, sustainability, cost, and performance as a result of continued electrification. However, electrification is accompanied by increased thermal loading due to inefficiencies in electrical components. This places extreme burden on thermal management systems responsible for transferring, storing, and rejecting thermal energy to maintain temperature constraints. Consequently, thermal management is now a major barrier to the continued electrification of vehicles.
Our research addresses this challenge by creating new tools that allow us to better understand, design, and control the complex dynamics of electrical and thermal systems in vehicles. This includes the development of control frameworks that coordinate among multiple subsystems, components, and physical domains of energy systems. Theoretical contributions provide analysis methods to ensure the stability and feasibility of model-based distributed and hierarchical control, while experimental validation bridges the gap between theory and practice, certifying the applicability of these frameworks as game-changing technology for electrified vehicles.
Power Grids
The modern electricity grid is undergoing rapid transformation due to rising energy demands, increased penetration of renewable energy sources, and the growing impact of extreme weather events. Microgrids—groupings of distributed energy resources (DERs) and loads capable of operating in “islanded” or “grid-connected” modes—have emerged as critical components of the effort towards enhanced grid efficiency and resilience. These systems utilize local renewable energy sources to meet demand or supply surplus power back to the main utility grid. However, the volatility of renewable resources, such as solar and wind, introduces significant stability challenges that must be addressed to ensure reliable operation.
Our work focuses on improving the reliability and stability of microgrid performance. By developing models that capture key transient and steady-state power dynamics across timescales ranging from sub-second to day-, week- and year-ahead planning, we design control frameworks capable of maintaining stability despite renewable energy volatility and unexpected disruptions.
Buildings
Air conditioning and refrigeration systems are responsible for a significant proportion of electrical energy usage and are a major contributor to peak demands. Therefore, increasing the efficiency of building thermal management systems and improving their integration with the electric power grid represent key opportunities for engineering a more sustainable future. Furthermore, improving the performance of climate control systems has been shown to significantly improve the health and productivity of human occupants.
While traditional approaches to improving efficiency and performance have oriented around the design of individual components, we focus on the system-level perspective of analyzing and coordinating interactions among all components. Due to the significant nonlinearities and multi-timescale interactions that result from processes such as latent heat transfer, a key focus of our efforts is the development of modeling and control approaches that balance between accuracy of representation and computational complexity.
Vehicles
The amount of electrical power on board vehicles has increased exponentially in recent decades and is expected to continue following this trend long into the future. Aircraft, naval ships, and both on- and off-road vehicles will all see dramatic improvements in efficiency, sustainability, cost, and performance as a result of continued electrification. However, electrification is accompanied by increased thermal loading due to inefficiencies in electrical components. This places extreme burden on thermal management systems responsible for transferring, storing, and rejecting thermal energy to maintain temperature constraints. Consequently, thermal management is now a major barrier to the continued electrification of vehicles.
Our research addresses this challenge by creating new tools that allow us to better understand, design, and control the complex dynamics of electrical and thermal systems in vehicles. This includes the development of control frameworks that coordinate among multiple subsystems, components, and physical domains of energy systems. Theoretical contributions provide analysis methods to ensure the stability and feasibility of model-based distributed and hierarchical control, while experimental validation bridges the gap between theory and practice, certifying the applicability of these frameworks as game-changing technology for electrified vehicles.
Buildings
Air conditioning and refrigeration systems are responsible for a significant proportion of electrical energy usage and are a major contributor to peak demands. Therefore, increasing the efficiency of building thermal management systems and improving their integration with the electric power grid represent key opportunities for engineering a more sustainable future. Furthermore, improving the performance of climate control systems has been shown to significantly improve the health and productivity of human occupants.
While traditional approaches to improving efficiency and performance have oriented around the design of individual components, we focus on the system-level perspective of analyzing and coordinating interactions among all components. Due to the significant nonlinearities and multi-timescale interactions that result from processes such as latent heat transfer, a key focus of our efforts is the development of modeling and control approaches that balance between accuracy of representation and computational complexity.
Vehicles
The amount of electrical power on board vehicles has increased exponentially in recent decades and is expected to continue following this trend long into the future. Aircraft, naval ships, and both on- and off-road vehicles will all see dramatic improvements in efficiency, sustainability, cost, and performance as a result of continued electrification. However, electrification is accompanied by increased thermal loading due to inefficiencies in electrical components. This places extreme burden on thermal management systems responsible for transferring, storing, and rejecting thermal energy to maintain temperature constraints. Consequently, thermal management is now a major barrier to the continued electrification of vehicles.
Our research addresses this challenge by creating new tools that allow us to better understand, design, and control the complex dynamics of electrical and thermal systems in vehicles. This includes the development of control frameworks that coordinate among multiple subsystems, components, and physical domains of energy systems. Theoretical contributions provide analysis methods to ensure the stability and feasibility of model-based distributed and hierarchical control, while experimental validation bridges the gap between theory and practice, certifying the applicability of these frameworks as game-changing technology for electrified vehicles.
Buildings
Air conditioning and refrigeration systems are responsible for a significant proportion of electrical energy usage and are a major contributor to peak demands. Therefore, increasing the efficiency of building thermal management systems and improving their integration with the electric power grid represent key opportunities for engineering a more sustainable future. Furthermore, improving the performance of climate control systems has been shown to significantly improve the health and productivity of human occupants.
While traditional approaches to improving efficiency and performance have oriented around the design of individual components, we focus on the system-level perspective of analyzing and coordinating interactions among all components. Due to the significant nonlinearities and multi-timescale interactions that result from processes such as latent heat transfer, a key focus of our efforts is the development of modeling and control approaches that balance between accuracy of representation and computational complexity.
Set theory is a mathematically rigorous language that we can leverage in the analysis and design of control systems. For example, sets can be used to describe all possible disturbances that can be applied to a system or bounds on our knowledge of the state of a system.
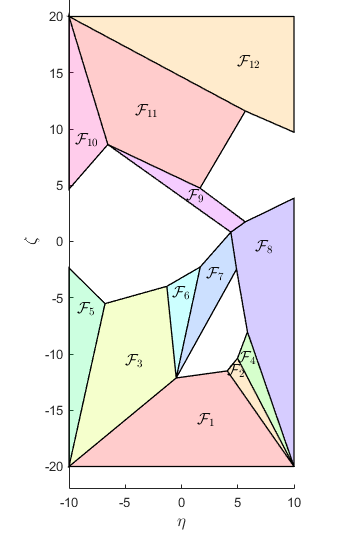
Our lab focuses in particular on a special class of sets called hybrid zonotopes. A single hybrid zonotope can represent a collection of convex polytopes. Take the figure to the right as an example. There are 12 convex polytopes in this figure, and their union can be represented as a single hybrid zonotope. Hybrid zonotopes have many useful properties that make them attractive in a dynamics and control context. In particular, many set operations for hybrid zonotopes have closed-form solutions, in contrast with more traditional and widely-used set representations.
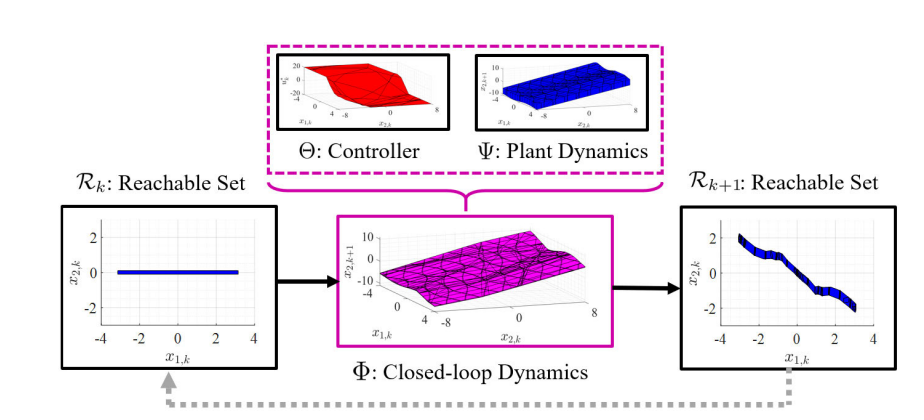
Hybrid zonotopes can be used to facilitate reachability analysis of switched or nonlinear systems. For example, the dynamics of systems controlled by neural networks can be analyzed using hybrid zonotopes. Reachability analysis provides a robust means of verifying or invalidating the safety of a dynamic system. Often, the goal of reachability analysis is to prove or disprove whether it is possible for the system to enter an unsafe set. Example reachability analyses that our lab has used hybrid zonotopes for include invalidating the safety of an aircraft collision avoidance system controlled by a neural network.
Hybrid zonotopes can also be used for model predictive control (MPC). Our lab has used this idea to develop a solver for MPC-based autonomous vehicle motion planning problems that exploits the particular structure and properties of a hybrid zonotope constraint representation. Example motion planning problems are shown in the figure below, where the blue dots are the autonomous vehicle trajectory, and the black regions are obstacles. Using our hybrid zonotope-based solver, we are able to solve these motion planning problems much faster than state-of-the-art solvers using a conventional constraint representation – often by an order magnitude.
Regardless of the physical domains (electrical, thermal, mechanical, etc.) governing their dynamics, many complex systems are fundamentally characterized by the storage, transport, and conversion of conserved quantities such as mass and energy. Examples include building thermal management systems, electrical power grids, and energy systems in land, sea, and air vehicles. The capability, safety, and efficiency of these systems can be strongly dependent on dynamic interactions within and between physical domains. Furthermore, these interactions can be highly nonlinear, occur across a wide range of timescales, and be governed by both continuous and switched behaviors.
The development of appropriate system-level dynamic models is essential to design and control. Models can be used to study a system's behavior and elucidate the most salient interactions driving its performance, and are also essential to model-based control approaches and design optimization. Furthermore, implementing a controller on a model in simulation as an intermediate step before experimental implementation allows the controller's performance to be evaluated in a cost effective, safe, and time efficient manner.
To advance the design and control of energy systems, our lab focuses on the development of dynamic modeling approaches that exhibit the following features:
- Modular: Complete system models should be formed by interconnecting models of individual components and subsystems. This greatly reduces the time required to generate and validate system models, and permits models for a wide range of configurations and system scales to be readily constructed.
- Multi-domain: Dynamic interactions within and between all relevant physical domains and timescales should be captured within a unified modeling framework.
- Structure-preserving: In addition to capturing coupling within the system, the modeling approach should make explicit the underlying structure of that coupling.
- Flexible in representation: The required model fidelity may vary with application and computational resources. As such, the modeling approach must be easily flexible to accommodate various level of complexity in representation. This includes allowing the number of dynamic states used to model a given component or subsystem to be varied, and allowing the assumed form of model equations (linear, bilinear, nonlinear, etc.) to be adjusted. This also includes the ability to capture switched behavior in addition to continuous dynamics.
As new energy system applications and requirements emerge, engineers must learn how best to meet new needs, sometimes without the benefit of design heritage or the associated expert knowledge for particular systems. Energy system design problems can have a vast design space that is cognitively difficult to navigate. This motivates our research into efficient systematic design methods with the flexibility to explore new architectures and optimize component sizing.
Broadly speaking, control theory is the science of decision-making for engineered systems (i.e., how to “control” them by supplying the proper inputs to achieve a desired output behavior). The ubiquity of this field is such that nearly all devices and systems that play essential roles in our society rely on control algorithms to operate safely, efficiently, and with high performance. This includes vehicles such as aircraft and automobiles, utilities such as the electric power grid and building climate controls, manufacturing processes, and portable electronics such as cell phones. Historically, advances in control theory have played a leading role in establishing new paradigms in technology and society. Our lab seeks to continue this legacy into the future, advancing control theory to enable new capabilities in performance, efficiency, sustainability, and cost.
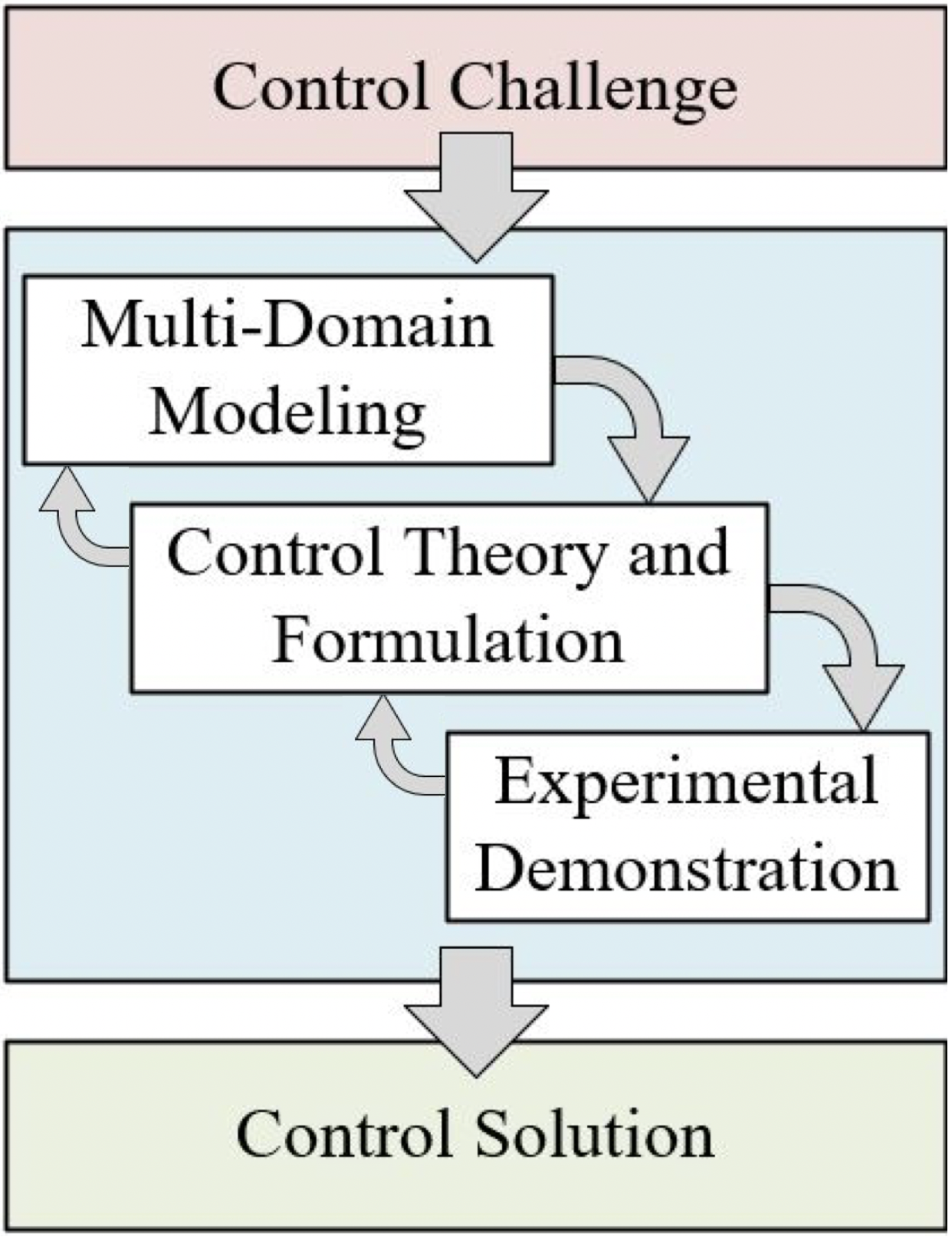
Our lab specializes in the application of control theory to energy systems in both stationary (e.g., buildings) and mobile (e.g., vehicles) systems. As shown in Fig. 1, our research process often begins with control-oriented dynamic modeling to gain physical insight into a system of interest. With this understanding, the control design challenge can be formulated analytically and addressed in a theoretic context by developing new control tools and formulations. The third stage is to translate these advances in control theory to engineering practice via application to experimental testbeds. These testbeds must be carefully designed to allow the hypothesis of the control design to be tested. Iteration may also occur in the reverse direction of these steps. For example, the results of experimental demonstration may suggest improvements that could be made to the control formulation.
From a theoretical standpoint, our lab specializes in several areas:
- Predictive control: Model Predictive Control (MPC) explicitly considers constraints on both actuator inputs and states, allowing operational limits to be directly considered in optimizing system performance. Furthermore, by continually evaluating over a time horizon into the future, MPC can leverage preview of upcoming disturbances and operational requirements to improve performance. For example, this allows thermal storage elements to be pre-cooled in advance of large heat loads, peak-shaving thermal transients and reducing violations of upper bounds on temperatures. In many energy systems, this preview information can be extracted from sources such as weather data and knowledge of the mission or flight plan.
- Set-based reachability analysis for closed-loop verification: Set-based reachability analysis can be used to verify the performance and safety of a dynamic system by computing the set of all possible trajectories subject to bounded uncertainties in initial states, disturbances, and/or parameters. However, reachability analysis of hybrid and nonlinear systems is computationally challenging due to the inherent non-convexity. To address this challenge, we work to develop new set representations and algorithms that enable computationally-efficient forward and backward reachability analysis, including for closed-loop systems under predictive control. This allows us to perform offline verification of important properties such as stability and robustness, without introducing artificial objectives and constraints into the online optimization formulation that would degrade performance.
- Distributed and hierarchical control: The dynamic complexity and scale of vehicle and building energy systems often preclude the use of a centralized controller governing all actuators. This is largely due to limitations in computing power and communication bandwidth. Traditionally, decentralized control approaches have been employed to decompose an overall energy management task into more manageable sub-tasks, with limited consideration of the dynamic interactions between subsystems. This practice necessitates conservative designs and can be time consuming and expensive to verify and validate, as well as significantly sub-optimal due to a lack of overall coordination in decision-making across the system. To address these shortcomings, our lab conducts research into the development of distributed and hierarchical control frameworks for a variety of large scale energy management applications. These frameworks employ a network of controllers that communicate with each other to coordinate behavior. Hierarchical frameworks are particularly suited to systems characterized by dynamics spanning a wide range of timescales (e.g., time constants spanning multiple orders of magnitude). This is achieved by including controllers that update at different rates to plan for the long-term behavior of slow dynamics while also governing fast transients and rejecting fast-timescale disturbances.
- Switched systems: Both stationary and mobile energy systems are often governed by both continuous behavior and discrete switching events. Examples of switching include the turning on and off of solenoid valves in fluid flow systems, transitions between melting and freezing in phase-change materials, addition and removal of suppliers or consumers in an electric grid, and switching in the power distribution systems of advanced vehicles. This switching necessitates special attention in control design. For example, even when it can be proved that each mode of a switched system is stable in independence, this alone does not guarantee that the system will remain stable under switching. Therefore, a focus of our research is the formulation and demonstration of switched control frameworks for energy management. This includes both experimental application and the development of theoretical tools for guaranteeing stability and robustness under switching.
As new thermal management system applications and requirements emerge, engineers must learn how best to meet new needs, sometimes without the benefit of design heritage or the associated expert knowledge for particular systems. Energy system design problems can have a vast design space that is cognitively difficult to navigate, motivating efficient systematic design methods with the flexibility to explore and assess new configurations and optimize component sizing.

